机器学习基础
代价函数
损失函数,代价函数,目标函数定义
- 损失函数
Loss Function是定义在单个样本上的,算的是一个样本的误差。 - 代价函数
Cost Function是定义在整个训练集上的,是所有样本误差的平均,也就是损失函数的平均。 - 目标函数
Object Function定义为:最终需要优化的函数。等于经验风险+结构风险(也就是Cost Function+ 正则化项)。
为什么代价函数要非负
目标函数存在一个下界,在优化过程当中,如果优化算法能够使目标函数不断减小,根据 单调有界准则,这个优化算法就能证明是收敛有效的。 只要设计的目标函数有下界,基本上都可以,代价函数非负更为方便。
常见代价函数
二次代价函数
其中,J 表示代价函数,x表示样本,y表示实际值,a表示输出值,n表示样本的总数。 使用一个样本为例简单说明,此时二次代价函数为:
假如使用梯度下降法(Gradient descent)来调整权值参数的大小,权值w和偏置b的梯度推 导如下

其中,z表示神经元的输入,sigma表示激活函数。权值w和偏置b的梯度跟激活函数的梯度 成正比,激活函数的梯度越大,权值w和偏置b的大小调整得越快,训练收敛得就越快。
神经网络常用的激活函数为sigmoid函数,该函数的曲线如下所示:
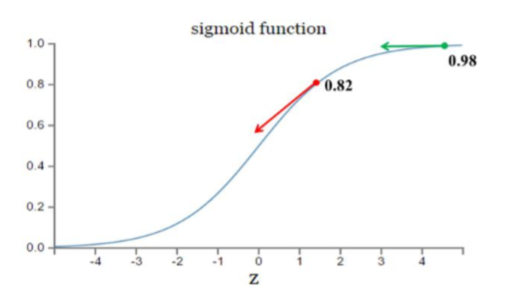
假设目标是收敛到1.0。0.82离目标比较远,梯度比较大,权值调整比较大。0.98 离目标比较近,梯度比较小,权值调整比较小。调整方案合理。 假如目标是收敛到0。0.82目标比较近,梯度比较大,权值调整比较大。0.98离目标比较远,梯度比较小,权值调整比较小。调整方案不合理。 原因:初始的代价(误差)越大,导致训练越慢。
交叉熵代价函数
![— E [y In a + (I — — a)]](/2019/10/01/%E6%9C%BA%E5%99%A8%E5%AD%A6%E4%B9%A0%E5%9F%BA%E7%A1%80/clip_image005.png)
其中,J表示代价函数,x表示样本,y表示实际值,a表示输出值,n表示样本的总数。 权值w和偏置b的梯度推导如下:

当误差越大时,梯度就越大,权值w和偏置b调整就越快,训练的速度也就越快。 二次代价函数适合输出神经元是线性的情况,交叉熵代价函数适合输出神经元是 S 型函数的情况。
对数似然代价函数
对数释然函数常用来作为softmax 回归的代价函数。深度学习中普遍的做法是将softmax作为最后一层,此时常用的代价函数是对数释然代价函数。 对数似然代价函数与softmax的组合和交叉熵与sigmoid函数的组合非常相似。对数释然代价函数在二分类时可以化简为交叉熵代价函数的形式。
在tensorflow中:
与sigmoid搭配使用的交叉熵函数:tf.nn.sigmoid_cross_entropy_with_logits()。
与softmax搭配使用的交叉熵函数:tf.nn.softmax_cross_entropy_with_logits()。
为什么用交叉熵代替二次代价函数
为什么不用二次方代价函数
权值w和偏置b的偏导数为

偏导数受激活函数的导数影响,sigmoid 函数导数在输出接近 0 和 1 时非常小,会导致一些实例在刚开始训练时学习得非常慢。
为什么要用交叉熵
交叉熵函数权值w和偏置b的梯度推导为:
由以上公式可知,权重学习的速度受到sigma(z) - y 的影响,更大的误差,就有更快的学习速度,避免了二次代价函数方程中因sigma'(z)导致的学习缓慢的情况。
损失函数
什么是损失函数?
损失函数(Lossfunction)又叫做误差函数,用来衡量算法的运行情况,估量模型的预测值与真实值Y的不一致程度,是一个非负实值函数,通常使用来表示,损失函数越小,模型的鲁棒性就越好。 损失函数是经验风险函数的核心部分,也是结构风险函数重要组成部分。
常见的损失函数
机器学习通过对算法中的目标函数进行不断求解优化,得到最终想要的结果。分类和回归问题中,通常使用损失函数或代价函数作为目标函数。 损失函数用来评价预测值和真实值不一样的程度。通常损失函数越好,模型的性能也越好。 损失函数可分为经验风险损失函数和结构风险损失函数。经验风险损失函数指预测结果和实际结果的差别,结构风险损失函数是在经验风险损失函数上加上正则项。 下面介绍常用的损失函数:
0-1 损失函数
如果预测值和目标值相等,值为 0,如果不相等,值为 1.
一般的在实际使用中,相等的条件过于严格,可适当放宽条件:
绝对值损失函数
和 0-1 损失函数相似,绝对值损失函数表示为

平方损失函数

这点可从最小二乘法和欧几里得距离角度理解。最小二乘法的原理是,最优拟合曲线应该 使所有点到回归直线的距离和最小
log 对数损失函数

常见的逻辑回归使用的就是对数损失函数,有很多人认为逻辑回归的损失函数是平方损失, 其实不然。逻辑回归它假设样本服从伯努利分布,进而求得满足该分布的似然函数,接着取对数求极值等。逻辑回归推导出的经验风险函数是最小化负的似然函数,从损失函数的角度看, 就是 log 损失函数。
指数损失函数
指数损失函数的标准形式为:
![I f exp[— yf(x)]](/2019/10/01/%E6%9C%BA%E5%99%A8%E5%AD%A6%E4%B9%A0%E5%9F%BA%E7%A1%80/clip_image014.png)
例如 AdaBoost 就是以指数损失函数为损失函数。
Hinge 损失函数
Hinge 损失函数的标准形式如下:
其中 y 是预测值,范围为(-1,1),t 为目标值,其为-1 或 1.
在线性支持向量机中,最优化问题可等价于
上式相似于下式
其中$l(wx_i+by_i)$ 是Hinge 损失函数,$||w||^2$可看做为正则化项
逻辑回归为什么使用对数损失函数?
假设逻辑回归模型
假设逻辑回归模型的概率分布是伯努利分布,其概率质量函数为
其似然函数为

对数似然函数为
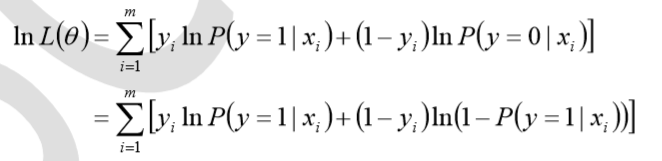
对数函数在单个数据点上的定义为

则全局样本损失函数为

由此可看出,对数损失函数与极大似然估计的对数似然函数本质上是相同的。所以逻辑回 归直接采用对数损失函数。
梯度下降法
直观理解
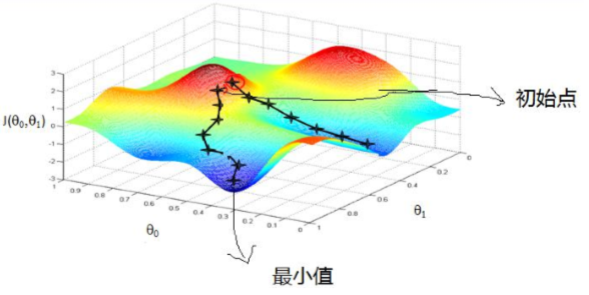
由上图,假如最开始,我们在一座大山上的某处位置,因为到处都是陌生的,不知道下山的路,所以 只能摸索着根据直觉,走一步算一步,在此过程中,每走到一个位置的时候,都会求解当前位置的梯度, 沿着梯度的负方向,也就是当前最陡峭的位置向下走一步,然后继续求解当前位置梯度,向这一步所在位 置沿着最陡峭最易下山的位置走一步。不断循环求梯度,就这样一步步的走下去,一直走到我们觉得已经 到了山脚。当然这样走下去,有可能我们不能走到山脚,而是到了某一个局部的山峰低处。 由此,从上面的解释可以看出,梯度下降不一定能够找到全局的最优解,有可能是一个局部最优解。 当然,如果损失函数是凸函数,梯度下降法得到的解就一定是全局最优解。
核心思想归纳
- 初始化参数,随机选取取值范围内的任意数;
- 迭代操作:
- 计算当前梯度;
- 修改新的变量;
- 计算朝最陡的下坡方向走一步;
- 判断是否需要终止,如否,返回 a);
- 得到全局最优解或者接近全局最优解
随机梯度和批量梯度区别
随机梯度下降和批量梯度下降是两种主要梯度下降法,其目的是增加某些限制来加速运算求解。
引入随机梯度下降法与mini-batch梯度下降法是为了应对大数据量的计算而实现一种快速的求解。
下面通过介绍两种梯度下降法的求解思路,对其进行比较。
假设函数为

损失函数为

其中,m为样本个数, j为参数个数。
批量梯度下降的求解思路
- 得到每个$theta$对应的梯度:

- 由于是求最小化风险函数,所以按每个参数$theta$的梯度负方向更新$theta_i$ :

优点
- 一次迭代是对所有样本进行计算,此时利用矩阵进行操作,实现了并行。
- 由全数据集确定的方向能够更好地代表样本总体,从而更准确地朝向极值所在的方向。当目标函数为凸函数时,BGD一定能够得到全局最优。
缺点
- 当样本数目 mm 很大时,每迭代一步都需要对所有样本计算,训练过程会很慢。
- 从迭代的次数上来看,BGD迭代的次数相对较少。
随机梯度下降的求解思路
- 相比批量梯度下降对应所有的训练样本,随机梯度下降法中损失函数对应的是训练集中每个样本的粒度。 损失函数可以写成如下这种形式

- 对目标函数求偏导得到每个$theta$对应的梯度:

- 对每个参数 $theta$按梯度方向更新$theta_i$ :

注意:不再有求和符号
优点
- 由于不是在全部训练数据上的损失函数,而是在每轮迭代中,随机优化某一条训练数据上的损失函数,这样每一轮参数的更新速度大大加快。
缺点
- 准确度下降。由于即使在目标函数为强凸函数的情况下,SGD仍旧无法做到线性收敛。
- 可能会收敛到局部最优,由于单个样本并不能代表全体样本的趋势。
- 不易于并行实现。
小结
随机梯度下降法、批量梯度下降法相对来说都比较极端,简单对比如下:
批量梯度下降
- 采用所有数据来梯度下降
- 批量梯度下降法在样本量很大的时候,训练速度慢。
随机梯度下降
- 随机梯度下降用一个样本来梯度下降。
- 训练速度很快。
- 随机梯度下降法仅仅用一个样本决定梯度方向,导致解有可能不是最优。
下面介绍能结合两种方法优点的小批量梯度下降法。
小批量mini-batch梯度下降的求解思路
对于总数为m个样本的数据,根据样本的数据,选取其中的n(1<n<m)个子样本来迭代。 其参数$theta$按梯度方向更新 $theta_i$公式如下:

优点
- 通过矩阵运算,每次在一个batch上优化神经网络参数并不会比单个数据慢太多
- 每次使用一个batch可以大大减小收敛所需要的迭代次数,同时可以使收敛到的结果更加接近梯度下降的效果。(比如上例中的30W,设置batch_size=100时,需要迭代3000次,远小于SGD的30W次)
- 可实现并行化
缺点
- batch_size的不当选择可能会带来一些问题。
batch_size的选择带来的影响
- 在合理地范围内,增大batch_size的好处:
- 内存利用率提高了,大矩阵乘法的并行化效率提高
- 跑完一次 epoch(全数据集)所需的迭代次数减少,对于相同数据量的处理速度进一步加快
- 在一定范围内,一般来说 Batch_Size 越大,其确定的下降方向越准,引起训练震荡越小
- 盲目增大batch_size的坏处
- 内存利用率提高了,但是内存容量可能撑不住了
- 跑完一次 epoch(全数据集)所需的迭代次数减少,要想达到相同的精度,其所花费的时间大大增加了,从而对参数的修正也就显得更加缓慢
- Batch_Size 增大到一定程度,其确定的下降方向已经基本不再变化
各种梯度下降法性能比较

BGD、SGD、Mini-batchGD,前面均已讨论过,这里介绍一下 OnlineGD。
OnlineGD 于 mini-batchGD/SGD 的区别在于,所有训练数据只用一次,然后丢弃。这样做的优点在于可预测最终模型的变化趋势。
OnlineGD 在互联网领域用的较多,比如搜索广告的点击率(CTR)预估模型,网民的点击 行为会随着时间改变。用普通的 BGD 算法(每天更新一次)一方面耗时较长(需要对所有历 史数据重新训练);另一方面,无法及时反馈用户的点击行为迁移。而 OnlineGD 算法可以实 时的依据网民的点击行为进行迁移。
模型评估
模型评估常用方法
一般情况来说,单一评分标准无法完全评估一个机器学习模型。只用 good 和 bad 偏离真 实场景去评估某个模型,都是一种欠妥的评估方式。下面介绍常用的分类模型和回归模型评估 方法。
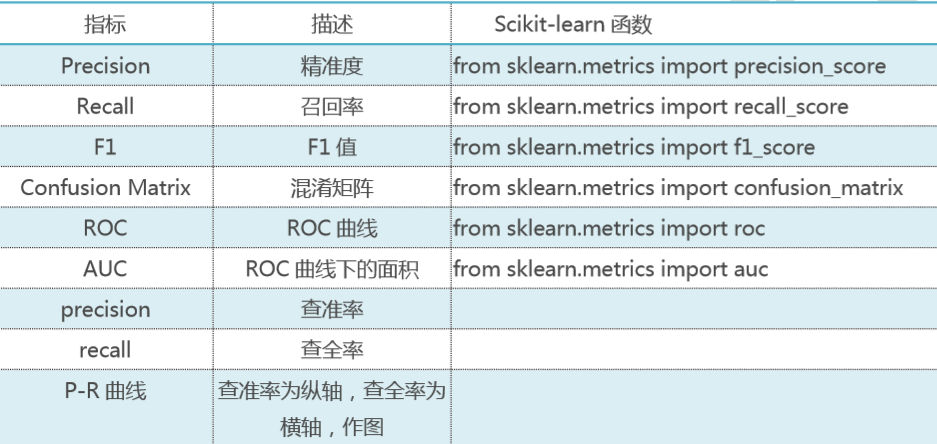
分类模型常用评估方法
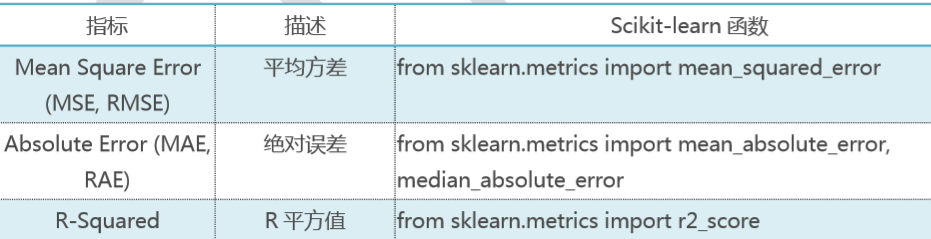
回归模型常用评估方法
经验误差与泛化误差
误差(error):一般地,我们把学习器的实际预测输出与样本的真是输出之间的差异称为 “误差”
经验误差(empiricalerror):也叫训练误差(trainingerror)。模型在训练集上的误差。
泛化误差(generalizationerror):模型在新样本集(测试集)上的误差称为“泛化误差”。
偏差、方差、欠拟合、过拟合
偏差和方差
偏差与方差分别是用于衡量一个模型泛化误差的两个方面;
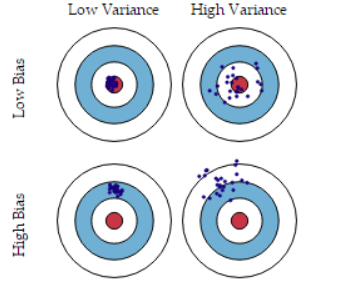
- 模型的偏差,指的是模型预测的期望值与真实值之间的差;偏差越大,越偏离真实数据,如下图第二行所示。
- 模型的方差,指的是模型预测的期望值与预测值之间的差平方和;描述的是预测值的变化范围,离散程度,也就是离其期望值的距离。方差越大,数据的分布越分散,模型的稳定程度越差。如果模型在训练集上拟合效果比较优秀, 但是在测试集上拟合效果比较差劣,则方差较大,说明模型的稳定程度较差,出现这种现象可 能是由于模型对训练集过拟合造成的。 如下图右列所示。
在监督学习中,模型的泛化误差可分解为偏差、方差与噪声之和。

- 偏差用于描述模型的拟合能力;方差用于描述模型的稳定性。 简单的总结一下: 偏差大,会造成模型欠拟合; 方差大,会造成模型过拟合
导致偏差和方差的原因
- 偏差通常是由于我们对学习算法做了错误的假设,或者模型的复杂度不够
- 比如真实模型是一个二次函数,而我们假设模型为一次函数,这就会导致偏差的增大(欠拟合)
- 由偏差引起的误差通常在训练误差上就能体现,或者说训练误差主要是由偏差造成的
- 方差通常是由于模型的复杂度相对于训练集过高导致的
- 比如真实模型是一个简单的二次函数,而我们假设模型是一个高次函数,这就会导致方差的增大(过拟合)
- 由方差引起的误差通常体现在测试误差相对训练误差的增量上
深度学习中的偏差与方差
- 神经网络的拟合能力非常强,因此它的训练误差(偏差)通常较小;
- 但是过强的拟合能力会导致较大的方差,使模型的测试误差(泛化误差)增大;
- 因此深度学习的核心工作之一就是研究如何降低模型的泛化误差,这类方法统称为正则化方法。
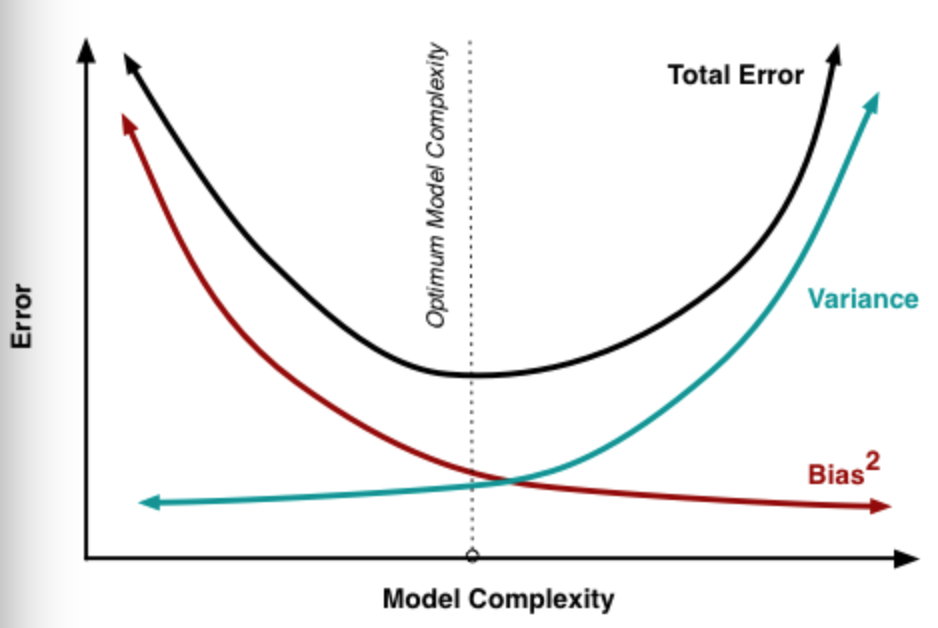
随着模型复杂度的增加,方差会逐渐增大,偏差会逐渐减小
欠拟合和过拟合定义
- 模型欠拟合:在训练集以及测试集上同时具有较高的误差,此时模型的偏差较大;
- 模型过拟合:在训练集上具有较低的误差,在测试集上具有较高的误差,此时模型的方差较大。
- 模型正常:在训练集以及测试集上,同时具有相对较低的偏差以及方差。
图解
- 横轴为模型复杂程度,纵轴为误差
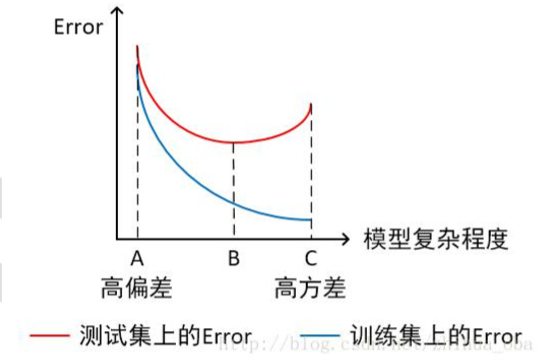
模型欠拟合:模型在点 A 处,在训练集以及测试集上同时具有较高的误差,此时模型的 偏差较大。
模型过拟合:模型在点 C 处,在训练集上具有较低的误差,在测试集上具有较高的误差, 此时模型的方差较大。 模型正常:模型复杂程度控制在点 B 处为最优。
- 横轴为正则项系数,纵轴为误差
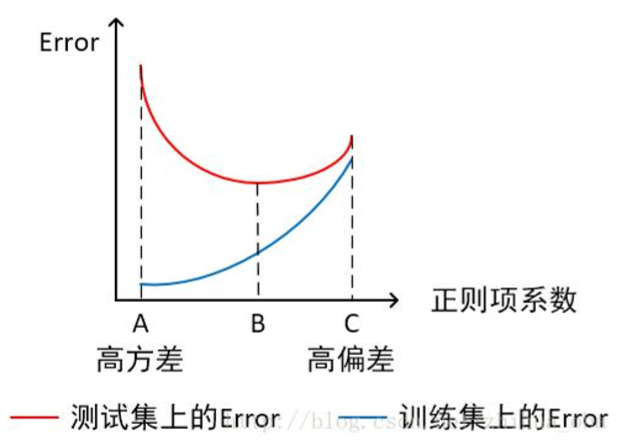
模型欠拟合:模型在点 C 处,在训练集以及测试集上同时具有较高的误差,此时模型的偏差较大。
模型过拟合:模型在点 A 处,在训练集上具有较低的误差,在测试集上具有较高的误差, 此时模型的方差较大。 模型正常:模型复杂程度控制在点 B 处为最优。
怎么判断是否过拟合,过拟合的曲线是什么样子的
- train loss 不断下降,test loss不断下降,说明网络仍在学习;
- train loss 不断下降,test loss趋于不变,说明网络过拟合;
- train loss 趋于不变,test loss不断下降,说明数据集100%有问题;
- train loss 趋于不变,test loss趋于不变,说明学习遇到瓶颈,需要减小学习率或批量数目;
- train loss 不断上升,test loss不断上升,说明网络结构设计不当,训练超参数设置不当,数据集经过清洗等问题。
如何解决过拟合和欠拟合
如何解决欠拟合
- 添加其他特征项。组合、泛化、相关性、上下文特征、平台特征等特征是特征添加的重要手段,有时候特征项不够会导致模型欠拟合
- 添加多项式特征。例如将线性模型添加二次项或三次项使模型泛化能力更强。例如, FM 模型、FFM 模型,其实就是线性模型,增加了二阶多项式,保证了模型一定的拟合程度
- 可以增加模型的复杂程度
- 减小正则化系数。正则化的目的是用来防止过拟合的,但是现在模型出现了欠拟合, 则需要减少正则化参数
如何解决过拟合
- 重新清洗数据,数据不纯会导致过拟合,此类情况需要重新清洗数据
- 增加训练样本数量,数据增强
- 降低模型复杂程度
- 增大正则项系数
- 采用 dropout 方法,dropout 方法,通俗的讲就是在训练的时候让神经元以一定的概率不工作
- 提前终止(earlystoping)
- 减少迭代次数
- 增大学习率
- 添加噪声数据
- 树结构中,可以对树进行剪枝
欠拟合和过拟合这些方法,需要根据实际问题,实际模型,进行选择。
交叉验证
为了得到更为稳健可靠的模型,对模型的泛化误差进行评估,得到模型泛化误差的近似值。 当有多个模型可以选择时,我们通常选择“泛化误差”最小的模型。 交叉验证的方法有许多种,但是最常用的是:留一交叉验证、k 折交叉验证
k 折交叉验证
- 将含有 N 个样本的数据集,分成 K 份,每份含有 N/K 个样本。选择其中 1 份作为测试集,另外 K-1 份作为训练集,测试集就有 K 种情况
- 在每种情况中,用训练集训练模型,用测试集测试模型,计算模型的泛化误差
- 将 K 种情况下,模型的泛化误差取均值,得到模型最终的泛化误差
注:
- 一般 2<=K<=10。 k 折交叉验证的优势在于,同时重复运用随机产生的子样本进行训练和验证,每次的结果验证一次,10 折交叉验证是最常用的
- 训练集中样本数量要足够多,一般至少大于总样本数的 50%
- 训练集和测试集必须从完整的数据集中均匀取样。均匀取样的目的是希望减少训练集、 测试集与原数据集之间的偏差。当样本数量足够多时,通过随机取样,便可以实现均匀取样的效果
类别不平衡产生原因?
类别不平衡(class-imbalance)是指分类任务中不同类别的训练样例数目差别很大的情况。
产生原因: 通常分类学习算法都会假设不同类别的训练样例数目基本相同。如果不同类别的训练样例 数目差别很大,则会影响学习结果,测试结果变差。例如二分类问题中有 998 个反例,正例有 2 个,那学习方法只需返回一个永远将新样本预测为反例的分类器,就能达到 99.8%的精度; 然而这样的分类器没有价值。
常见的类别不平衡问题解决方法
防止类别不平衡对学习造成的影响,在构建分类模型之前,需要对分类不平衡性问题进行 处理。主要解决方法有:
扩大数据集
增加包含小类样本数据的数据,更多的数据能得到更多的分布信息。
对大类数据欠采样
减少大类数据样本个数,使与小样本个数接近。
缺点:欠采样操作时若随机丢弃大类样本,可能会丢失重要信息。
代表算法:EasyEnsemble。利用集成学习机制,将大类划分为若干个集合供不同的学习器 使用。相当于对每个学习器都进行了欠采样,但在全局来看却不会丢失重要信息。
对小类数据过采样
过采样:对小类的数据样本进行采样来增加小类的数据样本个数。
代表算法:SMOTE 和 ADASYN。
SMOTE:通过对训练集中的小类数据进行插值来产生额外的小类样本数据。 新的少数类样本产生的策略:对每个少数类样本 a,在 a 的最近邻中随机选一个样本 b, 然后在 a、b 之间的连线上随机选一点作为新合成的少数类样本。
ADASYN:根据学习难度的不同,对不同的少数类别的样本使用加权分布,对于难以学习的少数类的样本,产生更多的综合数据。 通过减少类不平衡引入的偏差和将分类决策边界 自适应地转移到困难的样本两种手段,改善了数据分布。
使用新评价指标
如果当前评价指标不适用,则应寻找其他具有说服力的评价指标。比如准确度这个评价指标在类别不均衡的分类任务中并不适用,甚至进行误导。因此在类别不均衡分类任务中,需要使用更有说服力的评价指标来对分类器进行评价。
选择新算法
不同的算法适用于不同的任务与数据,应该使用不同的算法进行比较。
数据代价加权
例如当分类任务是识别小类,那么可以对分类器的小类样本数据增加权值,降低大类样本的权值,从而使得分类器将重点集中在小类样本身上。
转化问题思考角度
例如在分类问题时,把小类的样本作为异常点,将问题转化为异常点检测或变化趋势检测问题。 异常点检测即是对那些罕见事件进行识别。变化趋势检测区别于异常点检测在于其通 过检测不寻常的变化趋势来识别。
将问题细化分析
对问题进行分析与挖掘,将问题划分成多个更小的问题,看这些小问题是否更容易解决。
归一化
为什么归一化能提高求解最优解速度
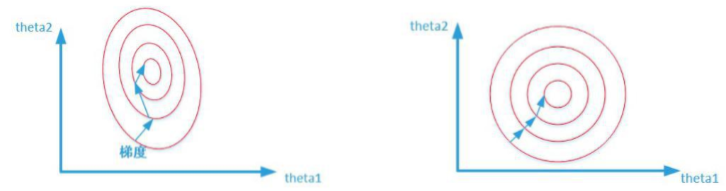
两张图代表数据是否均一化的最优解寻解过程(圆圈可以理解为等高线)。左图表示未经 归一化操作的寻解过程,右图表示经过归一化后的寻解过程。 当使用梯度下降法寻求最优解时,很有可能走“之字型”路线(垂直等高线走),从而导 致需要迭代很多次才能收敛;而右图对两个原始特征进行了归一化,其对应的等高线显得很圆, 在梯度下降进行求解时能较快的收敛。 因此如果机器学习模型使用梯度下降法求最优解时,归一化往往非常有必要,否则很难收 敛甚至不能收敛。
归一化类型
线性归一化
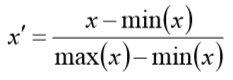
适用范围:比较适用在数值比较集中的情况。
缺点:如果 max 和 min 不稳定,很容易使得归一化结果不稳定,使得后续使用效果也不 稳定。
标准差归一化
含义:经过处理的数据符合标准正态分布,即均值为 0,标准差为 1 其中μ为所有样本数 据的均值,σ为所有样本数据的标准差。
非线性归一化
适用范围:经常用在数据分化比较大的场景,有些数值很大,有些很小。通过一些数学函 数,将原始值进行映射。该方法包括 log、指数,正切等。
如何进行特征选择(feature selection)
如何考虑特征选择
当数据预处理完成后,我们需要选择有意义的特征输入机器学习的算法和模型进行训练。 通常来说,从两个方面考虑来选择特征:
- 特征是否发散:如果一个特征不发散,例如方差接近于 0,也就是说样本在这个特征上基本上没有差异,这个特征对于样本的区分并没有什么用。
- 特征与目标的相关性:这点比较显见,与目标相关性高的特征,应当优选选择。除 移除低方差法外,本文介绍的其他方法均从相关性考虑。
特征选择方法分类
根据特征选择的形式又可以将特征选择方法分为 3 种:
- Filter:过滤法,按照发散性或者相关性对各个特征进行评分,设定阈值或者待选择 阈值的个数,选择特征。
- Wrapper:包装法,根据目标函数(通常是预测效果评分),每次选择若干特征,或 者排除若干特征。
- Embedded:嵌入法,先使用某些机器学习的算法和模型进行训练,得到各个特征的 权值系数,根据系数从大到小选择特征。类似于 Filter 方法,但是是通过训练来确定特征的优劣。
特征选择目的
- 减少特征数量、降维,使模型泛化能力更强,减少过拟合;
- 增强对特征和特征值之间的理解。 拿到数据集,一个特征选择方法,往往很难同时完成这两个目的。通常情况下,选择一种 自己最熟悉或者最方便的特征选择方法(往往目的是降维,而忽略了对特征和数据理解的目的)。